
加载中...
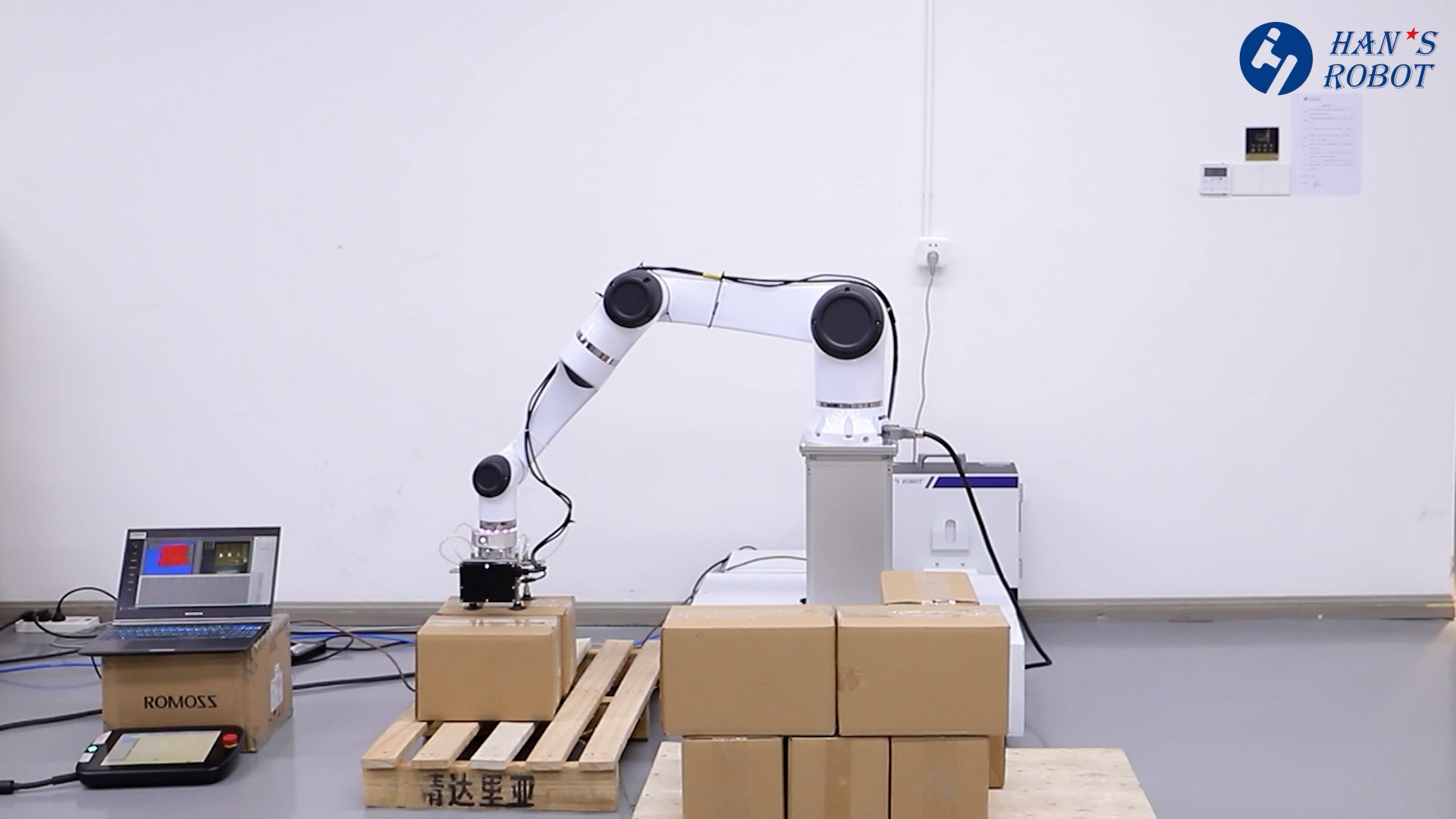
码垛机器人抓手一般用于工厂流水线区域。由工人把物件包装后,为了减少人力成本及提高工作效率,可以通过码垛机器人抓手把包装好的物品放置工作区域。那么操作码垛机器人抓手的操作步骤有哪些呢?
1、开机前识别产品
在开启码垛机器人之前,应该要去通过视觉传感器或其他识别技术来对产品进行检测和识别,其识别的方法可以通过读取产品上的条形码、qr码或利用计算机视觉技术来实现。
2、把控码垛机器人位置
对于要用码垛机器人来进行的空中抓手物件,一定要明确知道物件的尺寸和重量,通过预设的码垛规则并基于实时操作条件,确定适当的码垛位置。
3、码垛抓手物件作业
当物件需要通过被摆放到一个区域时,先用视线看准码垛抓手夹持产品的位置,再把物件夹持之后,并堆放到物件区域,以及保证码垛后产品的稳定性。
4、返回识别位置
码垛机器人抓手在完成码垛作业后,放回到产品被标识的位置,即初步的开始,待机或进行下一个产品的抓取码垛。
5、重复操作
码垛机器人抓手可根据需要重复上述步骤码垛的产品,并可根据任务要求和码垛规则进行连续作业。
